1. 图像复原与重建
1.1. 图像复原
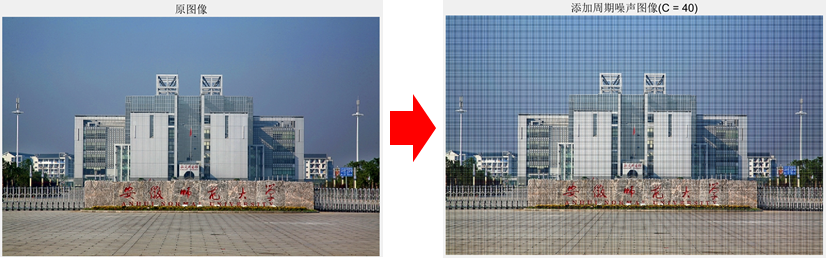
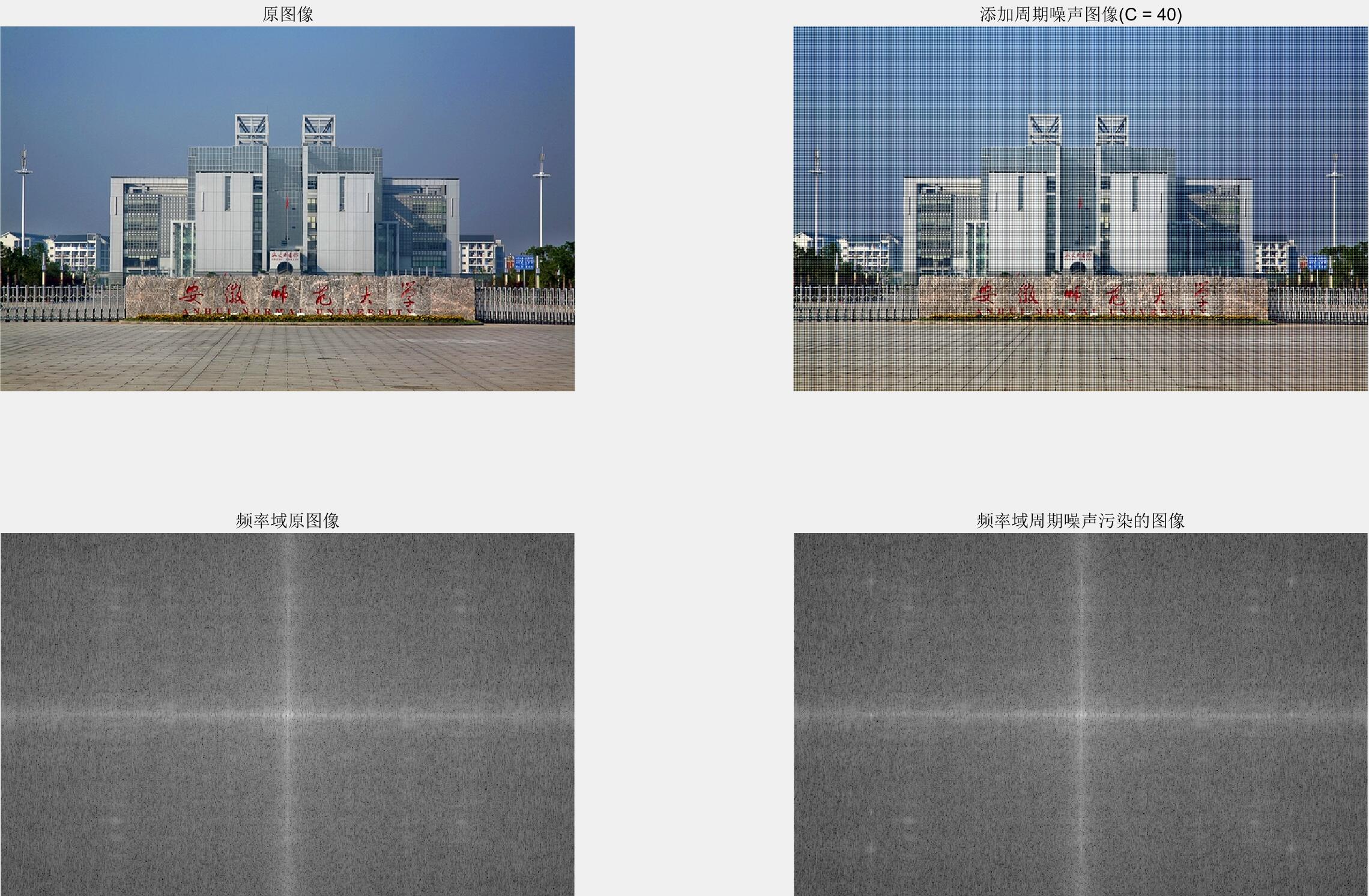
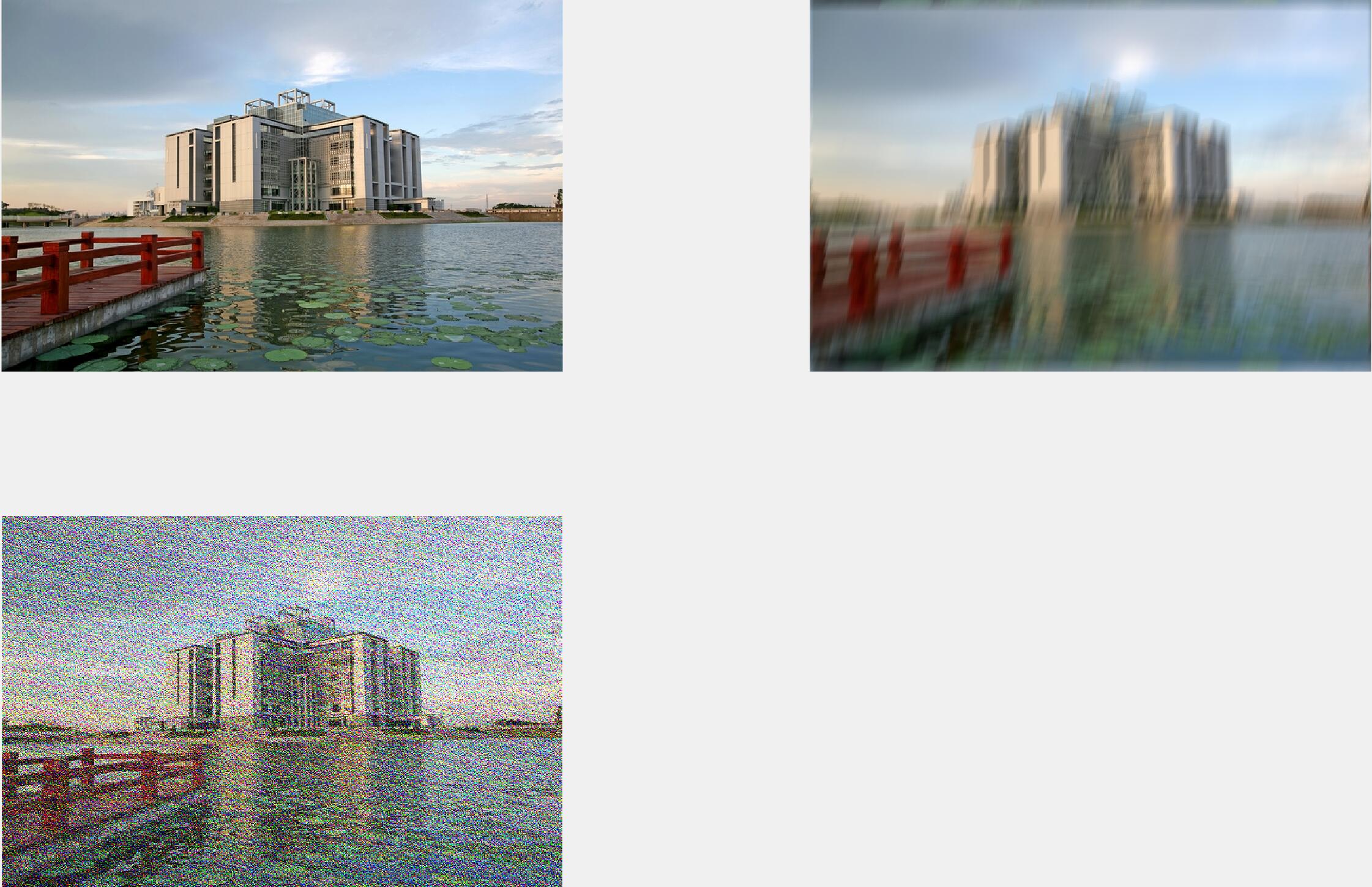
1.1.1. 周期噪声
- 周期噪声是在图像获取中从电力或机电干扰中产生
- 周期噪声可以通过频率域滤波显著减少
function [f_noise] = periodnoise(f,M,N,C)
f_noise = f;
for i = 1 : M
for j =1:N
f_noise(i,j) = f(i,j) +C*sin(C*j) + C*sin(C*i);
end
end
# Generating period noise
f =imread('../pic/4.jpg');
[M,N] = size(f);
C = 40; # 周期噪声幅度
f_noise= periodnoise(f,M,N,C);
figure;
subplot(221);
imshow(f);
title('原图像');
subplot(222);
imshow(f_noise);
title('添加周期噪声图像(C = 40)');
f1= fft2(double(f(:,:,1)));
f2 = fft2(double(f_noise(:,:,1)));
f1 = 1.0*log10(1+f1);
f2 = 1.0*log10(1+f2);
f1_1 = abs(fftshift(f1));
f2_1=abs(fftshift(f2));
subplot(223);imshow(f1_1,[]),title('频率域原图像');
subplot(224);imshow(f2_1,[]);title('频率域周期噪声污染的图像');
1.1.2. 图像复原的频率域滤波器
带阻滤波器
- 阻止一定频率范围内的信号通过而允许其它频率范围内的信号通过,消除或衰减傅里叶变换原点处的频段
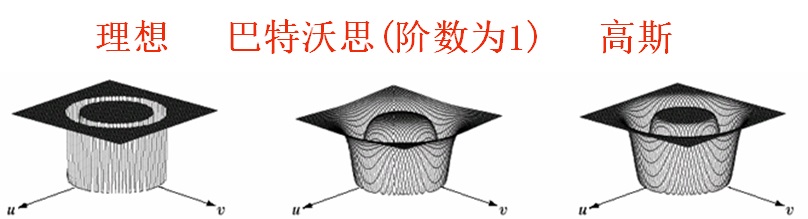
理想带阻滤波器
H(u,v)={101D(u,v)<D0−2WD0≤D(u,v)≤D0+2WD(u,v)>D0+2W
D(u,v)=√(u−2M)2+(v−2N)2
- W 是频带的宽带,D0是频带的中心半径。
巴特沃思带阻滤波器
H(u,v)=(1+D2(u,v)−D02D(u,v)W)2n1高斯带阻滤波器
H(u,v)=1−e−21[D(u,v)WD2(u,v)−D02]2
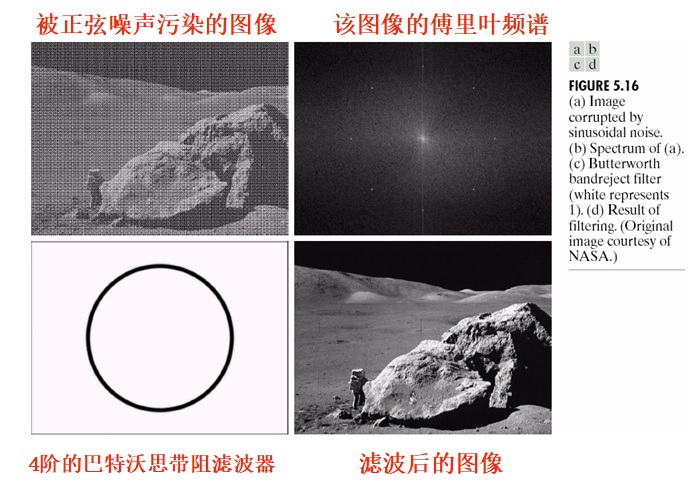
带通滤波器
- 允许一定频率范围内的信号通过而阻止其它频率范围内的信号通过。
Hbp=1−Hbr(u,v)
- Hbp(u,v) 表示带通滤波器
- Hbr(u,v) 表示带阻滤波器
陷波滤波器
- 阻止或通过事先定义的中心频率邻域内的频率
- 由于傅里叶变换是对称的,陷波滤波器必须以关于原点对称的形式出现
- 如果陷波滤波器位于原点处,则以它本身形式出现
陷波带通滤波器:通过包含在陷波区的频率
Hnp(u,v)=1−Hnr(u,v)
- Hnp(u,v)是陷波带通滤波器, Hnr(u,v)对应的陷波带阻滤波器。
- 当u0=v0=0时,陷波带通滤波器变为低通滤波器
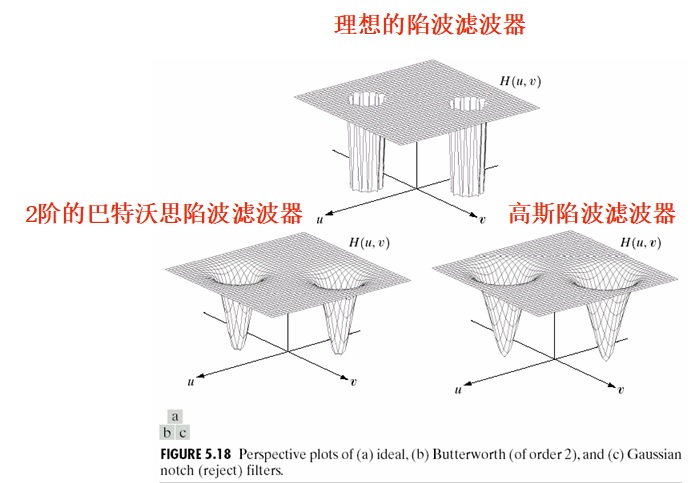
理想陷波带阻滤波器
H(u,v)={01D1(u,v)orD2(u,v)≤D0otherwise
D1(u,v)=√(u−2M−u0)2+(v−2N−v0)2
D2(u,v)=√(u−2M+u0)2+(v−2N+v0)2
- 中心在(u0,v0)且在(−u0,−v0)对称
巴特沃思陷波带阻滤波器
H(u,v)=1+[D1(u,v)D2(u,v)D02]2n1
高斯陷波带阻滤波器
H(u,v)=1−e−21[D02D1(u,v)D2(u,v)]
- 注:当u0=v0=0,上述3个滤波器变成高通滤波器
陷波带通滤波器:通过包含在陷波区的频率 Hnp(u,v)=1−Hnr(u,v)
- Hnp(u,v)是陷波带通滤波器,Hnr(u,v)对应的陷波带阻滤波器。
- 当u0=v0=0时,陷波带通滤波器变为低通滤波器
1.1.3. 图像退化
- 在图像生成、记录、传输过程中,由于成像系统、设备或外在的干扰,会导致图像质量下降,称为图像退化,如大气扰动效应、光学系统的像差、物体运动造成的模糊、几何失真等。
- 对退化图像进行处理,使之恢复原貌的技术称之为图像复原(Image Restoration)
- 图像复原的关键在于确定退化的相关知识,将退化过程模型化,采用相反的过程尽可能恢复原图,或者说使复原后的图像尽可能接近原图。
退化过程
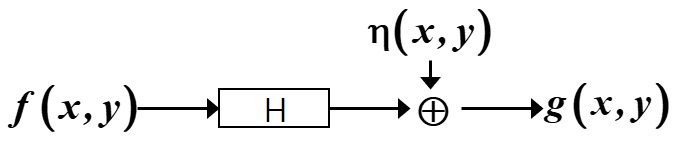
- 抽象为一个退化系统H以及加性噪声的影响
g(x,y)=H[f(x,y)]+η(x,y)
用线性、空间不变系统模型来模拟实际中的非线性和空间变化模型
H[f(x,y)]=f(x,y)⋅h(x,y)=∫−∞+∞∫−∞+∞f(α,β)⋅h(x−α,y−β)dαdβ
连续退化模型
g(x,y)=f(x,y)⋅h(x,y)+η(x,y)
- h(x,y) 称为点扩散函数(PSF),其傅里叶变换 H(x,y) 也称为光学传递函数(OTF)
离散退化模型
- f(α,β),h(x−α,y−β)进行均匀取样得到离散退化模型。
采样延拓
fe(x,y)={f(x,y)00≤x≤A−10≤y≤B−1A≤x≤M−1B≤y≤N−1
he(x,y)={h(x,y)00≤x≤C−10≤y≤D−1C≤x≤M−1D≤y≤N−1
二维离散卷积退化模型
ge(x,y)=∑m=0M−1∑n=0N−1fe(m,n)he(x−m,y−n)
图像复原是指在给定退化图像g(x,y),了解退化的点扩散函数f(x,y)和噪声项η(x,y)的情况下,估计出原始图像。
- 退化函数的步骤
- 确定图像的退化函数
- 采用合适的图像复原方法复原图像
- 采用与退化相反的过程,使复原后的图像尽可能接近原图,一般要确定一个合适的准则函数,最优情况对应最好的复原图。这一步的关键技术在于确定准则函数和求最优
- 可采用盲复原方法:直接从退化图像估计原图像
1.1.4. 基于模型的估计法
- 若已知引起退化的原因,根据基本原理推导出其退化模型,称为基于模型的估计法
1.1.5. 运动模糊退化估计
运动模糊图像
景物和摄像机之间的相对运动,曝光时间内,景物在不同时刻产生多个影像,叠加而导致的模糊,称为运动模糊
g(x,y)=∫0Tf(x−x0(t),y−y0(t))dt
$x{0}(t)$,$y{0}(t)$ 为x、y方向上的运动分量,T为曝光时间
运动模糊传递函数
H(u,v)=∫0Te−j2π[Tuat+Tvbt]dt
H(u,v)=π(ua+vb)]Tsin[π(ua+vb)]e−j2π(ua+vb)
运动模糊退化估计
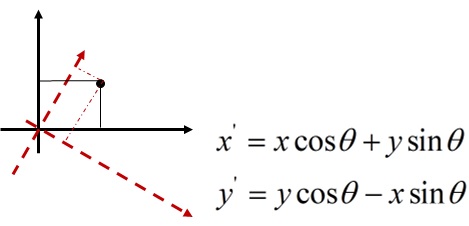
运动模糊的点扩散函数
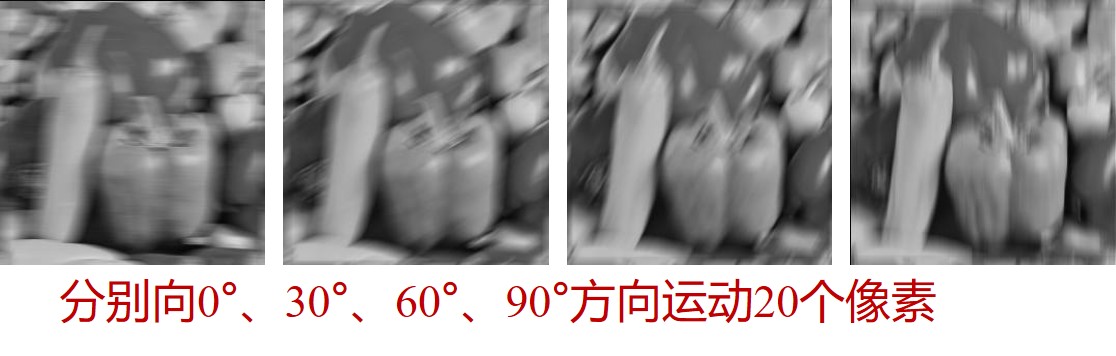
- 景物在x-y平面沿θ方向做匀速直线运动(θ是运动方向和x轴夹角),移动L个像素,点扩散函数为
h(x,y)={L10y=xtanθ,0≤x≤Lcosθy≠xtanθ,−∞<x<∞
I=imread('1.jpg');
figure(1);
subplot(221);
imshow(I);
LEN=30;
THETA=75;
PSF=fspecial('motion',LEN,THETA);
MF=imfilter(I,PSF,'circular','conv');
subplot(222);;imshow(MF);
wnr=deconvwnr(MF,PSF);
subplot(223);;imshow(wnr);
- 运动模糊点扩散函数参数估计
- 基于频域特征的参数估计
- 分析不同方向的运动模糊图像频谱变化
1.2. 图像重建
1.2.1. Radon变换
- Radon是奥地利数学家(1887~1956)
- 1917年发现了Rodon变换及其逆变换,但仅限于理论研究,没有实际应用
- 科马克<美>和豪斯菲尔德<英>应用到CT领域
- 发明第一台医学CT机
- 获得了1979年诺贝尔医学奖
Radon变换的应用
CT (计算机断层扫描Computer Tomography)MRI (磁共振成像Magnetic Resonance Imaging)PET (正电子发射断层摄影术Positron Emission Tomography)SPECT(单光子发射计算机断层成像Single Photon Emission Computer Tomography)
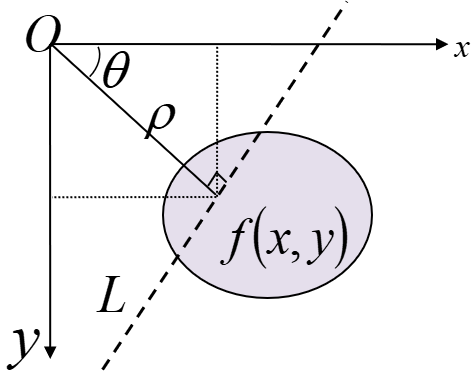
直线L:
ρ=xcos(θ)+ysin(θ)
将函数f(x,y)沿直线L做线积分
R(ρ,θ)=∫Lf(x,y)ds
采用Δ函数表示直线L
Δ(xcosθ+ysinθ−ρ)={01xcosθ+sinθ−ρ≠0xcosθ+sinθ−ρ=0
Randon变换对
R(ρ,θ)=∫−∞+∞∫−∞∞f(x,y)Δ(xcosθ+ysinθ−ρ)dxdy
f(x,y)=2π21∫0πdθ∫−∞∞xcosθ+ysinθ−ρ∂R/∂ρdρ
对一幅图像,在某一特定角度下的Radon变换会产生n个线积分值,构成一个n维的向量,称为f(x,y)在角度θ下的投影
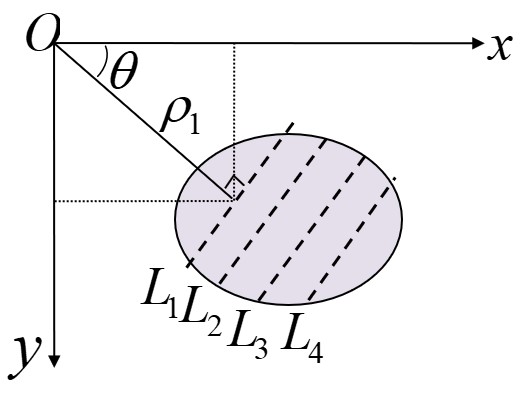
- Radon变换即XY空间向ρθ空间的投影,ρθ空间每一点对应XY空间一条线
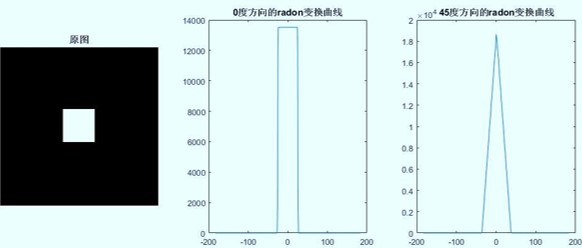
例1:对图像进行指定方向上的Radon变换
Image=rgb2gray(imread('block.bmp'));
[R1,X1]=radon(Image,0);
[R2,X2]=radon(Image,45);
subplot(131),imshow(Image),title('原图');
subplot(132),plot(X1,R1),title('0°方向上的Radon变换');
subplot(133),plot(X2,R2),title('45°方向上的Radon变换');
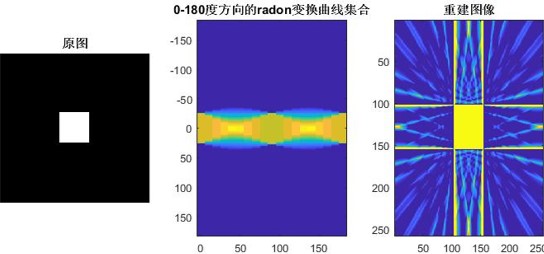
例2:对图像进行Radon变换和反变换
Image=rgb2gray(imread('block.bmp'));
theta=0:10:180;
[R,X]=radon(Image,theta);
result=iradon(R,theta);
subplot(131),imshow(Image),title('原图');
subplot(132),imagesc(theta,X,R),
title('radon变换曲线集合');
subplot(133),image(result),
title('重建图像');
- Radon变换的应用
- 可用来检测图像中的线段
- 图像中高灰度值的线段在ρθ空间形成亮点,低灰度值的线段形成暗点,对图像中线段的检测可转化为在ρθ空间对亮点、暗点的检测
- 计算出原图中各方向上的投影值,可以作为方向特征用于目标检测和识别
- 改变图像的表现形式,为相关处理提供便利